
Des recherches récentes de Google ont montré que l'intelligence artificielle et l'apprentissage automatique sont parmi les domaines les plus en vogue de l'ingénierie. Il est prédit que l'avenir de la robotique reposera sur Technologies d'IA et d'apprentissage automatique. Cependant, cet article est là pour souligner comment ces deux technologies peuvent être appliquées à la robotique aujourd'hui.
Intelligence artificielle, apprentissage automatique et robotique
Qu'est-ce que l'Intelligence Artificielle ?
Intelligence artificielle (IA) est un domaine de l'informatique qui implique l'étude des agents intelligents : tout appareil qui perçoit son environnement et prend des mesures qui maximisent ses chances de succès à un certain objectif. Les systèmes d'IA sont utilisés pour prendre des décisions complexes dans des conditions incertaines et sont capables d'apprendre de l'expérience. Certains exemples incluent la vision par ordinateur, la reconnaissance vocale, le traitement du langage naturel (TAL), la planification et la prise de décision.
L'IA a été définie comme "l'étude et la conception d'agents intelligents", où un agent intelligent est un système qui perçoit son environnement et prend des mesures pour atteindre des objectifs. Les objectifs peuvent être spécifiques ou inférentiels ; par exemple, l'opérateur peut considérer que sa tâche est terminée lorsque toutes les menaces de sécurité ont été éliminées ou jusqu'à ce que toutes les tâches prioritaires soient terminées.
Qu'est-ce que l'apprentissage automatique ?
L'apprentissage automatique est une forme d'intelligence artificielle (IA) et un sous-ensemble de la science des données. Dans l'apprentissage automatique, les ordinateurs sont "formés" pour apprendre à partir des données ; le processus peut inclure des techniques telles que la modélisation statistique, la reconnaissance de formes et la prédiction. Le nom d'apprentissage automatique provient d'Arthur Samuel, qui l'a inventé en 1959. Par la suite, d'autres chercheurs se sont joints à ce domaine et ont formé une nouvelle discipline universitaire qui s'est développée depuis lors.
L'apprentissage automatique explore l'étude et la construction d'algorithmes capables d'apprendre à partir de données, c'est-à-dire d'augmenter leur précision ou leurs performances avec l'expérience au fil du temps sans être explicitement programmés (par exemple, par un humain) pour le faire. Le domaine a été initialement appelé programmation logique inductive (ILP) par Stuart Meehl. Mais beaucoup d'autres préféraient les systèmes de tutorat intelligents ou les systèmes basés sur les connaissances. Ces systèmes ont évolué pour devenir des systèmes experts modernes. Ils produisent des règles liées à des conditions prédéterminées et à des actions détectées au moment de l'exécution ou lorsque des actions sont déclenchées en externe pour exécution par des capteurs surveillant les changements d'état du système. Ces événements sont provoqués par des causes d'entrée, telles que des événements de minuterie se produisant après qu'un certain intervalle de temps s'est écoulé depuis la dernière activation pour reprendre à nouveau l'exécution du mode de lecture. Le prochain cycle/itération redémarre une fois par seconde, etc.
Le domaine de l'apprentissage automatique a développé une large gamme d'algorithmes très efficaces, souvent basés sur l'analyse statistique et l'optimisation. Ces algorithmes sont utilisés pour les applications :
- Extraction de caractéristiques (par exemple, la détection automatisée des cellules cancéreuses),
- Reconnaissance de formes (par exemple, identification du visage),
- Exploration de données (par exemple, découverte de nouvelles associations entre différentes variables dans de grands ensembles de données),
- Analyse prédictive (par exemple, estimation des résultats futurs sur la base de modèles historiques).
Comment définissons-nous la robotique ?
Pour ceux qui ne connaissent pas le terme robotique, il s'agit d'une branche de l'ingénierie qui traite des robots. Le mot robot vient du mot tchécoslovaque « robot », qui signifie travail forcé. Les robots sont des automates qui fonctionnent selon des instructions préprogrammées et peuvent effectuer des tâches automatiquement sans supervision humaine. Ils peuvent également être programmés pour interagir avec l'environnement et prendre des décisions en fonction de leurs observations.
Un robot peut être défini comme un système électromécanique qui exécute certaines tâches sous le contrôle d'un programme informatique stocké dans sa mémoire (par exemple, un ordinateur personnel ou PLC). Le programme le dirige dans la réalisation de sa mission en dirigeant ses actions via des capteurs connectés à ses unités d'entrée sensorielles et des dispositifs d'actionnement pour manipuler des objets dans son environnement via des actionneurs connectés à ses unités de sortie effectrices (par exemple, des moteurs).
Comment fonctionne le ML en robotique ?
L'apprentissage automatique est un sous-ensemble de l'IA qui utilise des données pour s'entraîner. Un algorithme d'apprentissage automatique (MLA) analyse les expériences passées et fait des prédictions basées sur ces expériences. Cela signifie que les députés sont habitués à apprendre de l'expérience, ce qui leur permet de prendre des décisions sans être explicitement programmés pour eux.
Les MLA peuvent être utilisés en robotique pour toute tâche où le robot doit apprendre de sa propre expérience, notamment :
- Connaître son environnement au fil du temps pour mieux naviguer dans de nouveaux espaces.
- Faire des prédictions sur l'état futur de son environnement sur la base de documents historiques.
- Décider quelle(s) action(s) permettra le mieux d'atteindre un certain objectif.
Comment fonctionne l'IA en robotique ?
L'IA est un programme informatique qui peut apprendre, s'adapter et améliorer ses performances au fil du temps. C'est l'un des concepts les plus importants de la robotique et de l'apprentissage automatique.
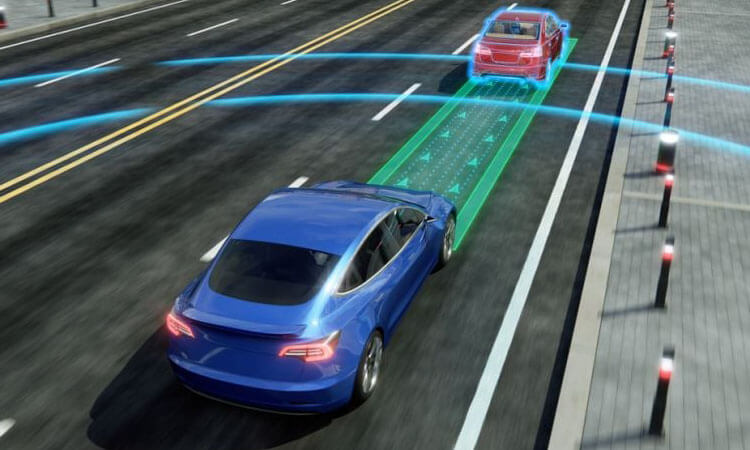
L'IA est utilisée pour alimenter les robots. Cela leur permet d'effectuer des tâches efficacement sans être programmés explicitement par des humains. Par exemple, si un véhicule autonome sur la route n'avait pas d'IA, il ne pouvait que rouler tout droit ou effectuer des manœuvres très basiques comme tourner à droite ou à gauche aux intersections. Cependant, avec l'IA installée dans ce véhicule, il serait capable de naviguer dans des environnements complexes. Comme les bâtiments et autres voies avec facilité, car il comprend où il va en fonction des informations qu'il reçoit de ses capteurs (tels que le GPS) et des caméras montées sur le dessus de la carrosserie elle-même.
Comment l'intelligence robotique s'est-elle développée au cours des dernières décennies ?
L'intelligence robotique a été développée dans les années 1950 par Ross Ashby, un cybernéticien britannique. Avant cette époque, les ingénieurs utilisaient des règles fixes pour leurs machines en fonction de leur expérience et de leur intuition. Ashby a utilisé des modèles mathématiques pour créer une machine intelligente capable d'apprendre de son environnement et de prendre des décisions basées sur des expériences passées. Cette approche a conduit au développement de réseaux de neurones et de simulations informatiques du fonctionnement du cerveau humain.
Le premier robot industriel a été fabriqué par Unimation en 1961. Il pouvait effectuer des tâches simples telles que le chargement et le déchargement de boîtes sur un tapis roulant à une cadence de 40 par heure en utilisant deux doigts contrôlés par le vide par main (le nombre total de doigts étant de quatre) . En 1974, plus de 30 000 robots travaillaient dans des usines du monde entier !
Intelligence artificielle et apprentissage automatique en robotique
Vous pouvez considérer l'intelligence artificielle et l'apprentissage automatique comme des technologies qui aident les robots à effectuer des tâches mieux qu'ils ne le pourraient sans la technologie. IA et ML en robotique sont les deux faces d'une même médaille - les deux sont des technologies qui permettent aux robots d'apprendre de leurs interactions avec l'environnement qui les entoure.
Beaucoup de gens pensent que l'IA est un concept de science-fiction, mais elle est déjà utilisée dans de nombreux aspects de notre vie quotidienne. Par exemple, Siri sur votre iPhone utilise des algorithmes de reconnaissance vocale et de traitement du langage naturel (NLP) pour comprendre ce que vous dites et répondre de manière appropriée. Alexa sur Amazon Echos utilise le NLP pour comprendre les questions des utilisateurs, telles que « Quel temps fait-il ? » ou "Raconte-moi une blague". Google Translate utilise à nouveau les algorithmes NLP pour traduire du texte dans une autre langue comme l'allemand ou le français.
Applications actuelles de l'apprentissage automatique en robotique
Apprentissage par imitation
L'apprentissage par imitation est un type d'approche d'apprentissage automatique qui permet à un agent d'apprendre du comportement d'autres agents ou humains. Il est étroitement lié à l'apprentissage par observation, un comportement manifesté par les nourrissons et les tout-petits. Dans l'apprentissage par imitation, un agent apprend à imiter le comportement d'un enseignant, qui démontre le comportement souhaité. Cette approche est souvent utilisée en robotique, où la programmation manuelle de solutions robotiques pour la mobilité en dehors d'une usine dans des domaines tels que la construction, l'agriculture, la recherche et le sauvetage, l'armée et autres, peut être difficile.
L'apprentissage par imitation est une catégorie parapluie pour l'apprentissage par renforcement. Il s'agit d'amener un agent à agir dans le monde pour maximiser ses récompenses. Les modèles bayésiens ou probabilistes sont souvent utilisés dans l'apprentissage par imitation, ce qui aide l'agent à apprendre une politique qui mappe les états aux actions. La question de savoir si l'apprentissage par imitation pouvait être utilisé pour les robots de type humanoïde a été posée pour la première fois en 1999.
Les chercheurs ont utilisé l'apprentissage par imitation pour développer des robots capables d'effectuer diverses tâches, notamment saisir des objets, marcher et naviguer sur des terrains hors route. Par exemple, CMU a appliqué des méthodes de contrôle optimal inverse pour développer la robotique humanoïde, la locomotion à pattes et les navigateurs mobiles tout-terrain tout-terrain. Une vidéo publiée il y a deux ans par des chercheurs de l'Arizona State University montre un robot humanoïde utilisant l'apprentissage par imitation pour acquérir différentes techniques de préhension.
Les réseaux de croyance bayésiens ont également été appliqués aux modèles d'apprentissage en avant, où un robot apprend sans connaissance préalable de son système moteur ou de l'environnement externe. Un exemple de ceci est le « babillage moteur », démontré par le Language Acquisition and Robotics Group de l'Université de l'Illinois à Urbana-Champaign (UIUC) avec Bert, le robot humanoïde « iCub ». Les robots peuvent utiliser l'apprentissage par imitation des actions des humains ou d'autres agents. Cela facilite la formulation de solutions pour des tâches complexes dans divers domaines.
Vision par ordinateur
La vision par ordinateur est un domaine en évolution rapide qui combine des algorithmes informatiques et du matériel de caméra pour permettre aux robots de traiter des données physiques. Cette technologie est essentielle pour le guidage des robots et les systèmes d'inspection automatique et a de nombreuses applications, dont l'identification et le tri d'objets. Alors que la vision par ordinateur, la vision artificielle et la vision robotique sont souvent utilisées de manière interchangeable, la vision robotique englobe l'étalonnage du cadre de référence et la capacité d'un robot à affecter physiquement son environnement.
Les progrès récents de la vision par ordinateur ont été alimentés par l'afflux de mégadonnées, y compris des photos et des vidéos annotées et étiquetées disponibles sur le Web. Les techniques d'apprentissage par prédiction structurée basées sur l'apprentissage automatique dans des universités comme Carnegie Mellon ont joué un rôle déterminant dans le développement d'applications de vision par ordinateur telles que l'identification et le tri d'objets. Un exemple d'une percée récente est l'utilisation de l'apprentissage non supervisé pour la détection d'anomalies, qui implique la construction de systèmes capables de trouver et d'évaluer les défauts dans les tranches de silicium à l'aide de réseaux de neurones convolutifs.
Le développement de technologies extrasensorielles telles que le radar et les ultrasons conduit à la création de systèmes basés sur la vision à 360 degrés pour les véhicules autonomes et les drones. Des entreprises comme Nvidia sont à la pointe de cette technologie, qui est utilisée pour améliorer la précision et la sécurité des véhicules autonomes et des drones. En combinant la vision par ordinateur avec des technologies extrasensorielles, les chercheurs créent des systèmes capables de détecter et d'éviter les obstacles, de naviguer dans des environnements complexes et d'effectuer diverses autres tâches avec une précision et une exactitude sans précédent.
Technologies d'assistance et médicales
Les technologies d'assistance et médicales sont des domaines dans lesquels la robotique basée sur l'apprentissage automatique a fait des progrès significatifs. Ces technologies sont conçues pour bénéficier aux personnes handicapées, aux personnes âgées et aux patients du monde médical.
Les robots d'assistance peuvent détecter, traiter des informations sensorielles et effectuer des actions utiles aux personnes. En raison des contraintes de coût, les robots de thérapie par le mouvement, qui offrent des avantages diagnostiques ou thérapeutiques, sont encore largement confinés au laboratoire. Parmi les premières technologies d'assistance, citons le DeVAR développé au début des années 1990.
Des exemples plus récents de technologies d'assistance robotique basées sur l'apprentissage automatique incluent le bras robotique MICO développé à la Northwestern University. Ce bras utilise un capteur Kinect pour observer le monde et s'adapter aux besoins de l'utilisateur avec une autonomie partielle, c'est-à-dire un partage du contrôle entre le robot et l'humain.
La robotique basée sur l'apprentissage automatique améliore considérablement la précision et la fiabilité chirurgicales dans le monde médical. Le Smart Tissue Autonomous Robot (STAR) est une collaboration entre des chercheurs de plusieurs universités et un réseau de médecins piloté par le biais du Children's National Health System à DC. STAR peut assembler des «intestins de porc» avec une précision et une fiabilité supérieures à celles des meilleurs chirurgiens humains. Bien qu'il ne soit pas destiné à remplacer les chirurgiens humains, STAR offre des avantages significatifs dans la réalisation de types similaires de chirurgies délicates.
Apprentissage auto-supervisé
Apprentissage auto-supervisé est une puissante approche d'apprentissage automatique qui peut bénéficier aux robots et autres appareils ayant un accès limité aux données étiquetées ou la nécessité de générer des exemples de formation pour améliorer les performances. Cette approche a été utilisée dans diverses applications, notamment la détection d'objets, l'analyse de scènes et la modélisation de la dynamique des véhicules.
Un exemple fascinant d'apprentissage auto-supervisé en action est Watch-Bot, un robot développé par des chercheurs de Cornell et de Stanford. En utilisant une combinaison de capteurs et de méthodes probabilistes, Watch-Bot peut détecter les schémas d'activité humaine normaux et utiliser un pointeur laser pour rappeler aux humains des tâches telles que remettre le lait au réfrigérateur. Lors des premiers tests, Watch-Bot a rappelé avec succès l'époque aux humains 60%, et les chercheurs ont continué à améliorer ses capacités grâce à un projet appelé RoboWatch.
Un autre exemple d'apprentissage auto-supervisé en robotique est un algorithme de détection de route développé au MIT pour les véhicules autonomes et autres robots mobiles. Cet algorithme utilise une caméra frontale et un modèle de distribution probabiliste pour identifier les routes et les obstacles sur le chemin.
En plus de l'apprentissage auto-supervisé, l'apprentissage autonome est une autre variante de l'apprentissage automatique qui peut bénéficier aux robots et autres appareils autonomes. Une approche, développée par une équipe de l'Imperial College de Londres, utilise un apprentissage en profondeur et des méthodes non supervisées pour intégrer l'incertitude du modèle dans la planification à long terme et l'apprentissage des contrôleurs. Cette approche statistique d'apprentissage automatique peut réduire l'impact des erreurs de modèle et accélérer le processus d'apprentissage, comme le démontre une vidéo sur le manipulateur réalisée par l'équipe.
Apprentissage multi-agents
L'apprentissage multi-agents est une technique d'apprentissage automatique qui implique la coordination et la négociation entre plusieurs robots ou agents pour atteindre un objectif commun. Les stratégies d'équilibre sont trouvées grâce à des algorithmes d'apprentissage qui permettent aux agents de s'adapter à un environnement changeant. Un exemple de cette approche est l'utilisation d'outils d'apprentissage sans regret, qui utilisent des algorithmes pondérés pour améliorer les résultats de la planification multi-agents, et l'apprentissage dans des systèmes de contrôle distribués basés sur le marché.
Le Lab for Information and Decision Systems du MIT a développé un exemple concret d'algorithme distribué permettant aux robots de collaborer et de construire un modèle d'apprentissage plus inclusif. Les robots explorent un bâtiment et ses agencements de pièces, chacun construisant son propre catalogue, qui est combiné pour créer une base de connaissances. Cette approche permet aux robots de traiter de plus petits morceaux d'informations et d'obtenir de meilleurs résultats lorsqu'ils travaillent ensemble qu'un seul robot. Bien qu'imparfait, ce type d'approche d'apprentissage automatique permet aux robots de renforcer les observations mutuelles, de comparer des catalogues ou des ensembles de données et de corriger les omissions ou les généralisations excessives.
L'apprentissage multi-agents a le potentiel d'être utilisé dans plusieurs applications, y compris les véhicules terrestres et aériens autonomes. Cette approche peut conduire à une performance plus efficace et efficiente en faisant communiquer et coopérer les robots pour atteindre un objectif commun. Cependant, d'autres recherches et développements sont nécessaires pour optimiser cette technique pour une utilisation dans le monde réel.
Application de l'apprentissage automatique et de l'intelligence artificielle à la robotique dans diverses industries
La robotique peut être appliquée dans diverses industries, telles que l'agriculture, la santé, la fabrication, la logistique, etc.
- Agriculture: L'utilisation de drones pour l'inspection des cultures est devenue très courante de nos jours. Ces drones sont équipés de capteurs qui mesurent différents paramètres comme la teneur en humidité du sol, les niveaux d'engrais, etc. Les données collectées à partir de ces capteurs sont renvoyées au serveur, où un algorithme les analyse et envoie des suggestions ou des alertes aux agriculteurs par SMS ou application mobile. notifications en fonction de l'état de leurs cultures/superficie.
- Soins de santé: Des robots basés sur l'IA sont utilisés dans les hôpitaux du monde entier à diverses fins, comme aider les médecins lors d'interventions chirurgicales ou diagnostiquer des patients en scannant des images prises à partir d'appareils IRM. Par exemple, la plate-forme d'intelligence artificielle Watson d'IBM a été déployée avec succès chez Highland Hospital Partners, le plus grand groupe hospitalier d'Écosse. Il est basé sur sa capacité à lire les dossiers médicaux plus rapidement que n'importe quel médecin humain (Watson a pu lire 1 million de pages en 10 minutes). Une étude menée par Accenture Strategy Limited indique que le taux d'adoption des initiatives de transformation numérique est le plus élevé parmi les prestataires de soins de santé que dans tous les autres secteurs verticaux de l'industrie (60%), suivi des services financiers (52%).
- Fabrication: Le secteur manufacturier est l'une des industries les plus importantes de tous les pays. Des robots alimentés par l'IA sont utilisés pour automatiser les processus de fabrication et augmenter l'efficacité. Par exemple, General Motors a récemment lancé un nouveau robot appelé « Baxter », qui aidera les travailleurs humains à effectuer des tâches répétitives comme ramasser des pièces dans des bacs ou les souder avec un minimum de supervision.
- Logistique: Des robots alimentés par l'IA sont utilisés pour optimiser les processus logistiques et réduire les coûts. Par exemple, DHL a lancé un nouveau robot alimenté par l'IA appelé "PakBot". Cela aidera les travailleurs humains à scanner les colis, à emballer les articles dans des boîtes et à les étiqueter avec des codes-barres afin de réduire le temps nécessaire pour expédier les produits dans le monde entier (cela devrait également garantir que les clients reçoivent leurs commandes plus rapidement).
- Éducation: Les robots alimentés par l'IA sont utilisés à diverses fins dans l'éducation. Par exemple, des robots sont utilisés pour aider les enseignants à noter les dissertations et les articles plus rapidement et avec plus de précision que jamais. Ils peuvent également être utilisés dans les salles de classe pour enseigner aux enfants des compétences de vie importantes comme comment cuisiner ou nettoyer après eux-mêmes.
L'avenir de l'IA et de l'apprentissage automatique dans la robotique
Comme nous l'avons vu, l'IA et le ML sont appliqués à la robotique depuis de nombreuses années. La technologie évolue constamment, ouvrant la porte à de nouvelles façons d'introduire l'IA et le ML dans le monde de la robotique. Cela signifie qu'il est tout à fait possible que vous voyiez l'IA et le ML être utilisés d'une manière à laquelle vous n'avez même pas encore pensé !
L'IA et le ML peuvent être appliqués à la robotique dans de nombreux autres secteurs que la fabrication ou la santé, ainsi que d'autres manières que ce dont nous avons discuté ici. Par exemple, les chercheurs étudient comment ils pourraient utiliser des algorithmes d'apprentissage automatique basés sur des techniques d'apprentissage en profondeur pour enseigner de nouvelles compétences aux robots plus rapidement que jamais. Une de ces études a révélé que les ordinateurs pouvaient apprendre à reconnaître les objets qui les entourent après avoir observé les humains le faire une seule fois - quelque chose prend normalement des heures ou des jours aux humains !
Conclusion
Vous comprenez maintenant clairement le rôle de l'IA et de l'apprentissage automatique dans la robotique. Ils sont déjà utilisés et le seront davantage à l'avenir. Ils sont utilisés dans tous les aspects de la robotique, même s'ils ne sont pas nécessaires pour chaque partie de la fonction d'un robot. Et ils seront probablement davantage utilisés à l'avenir à mesure que la technologie progressera.
Source vidéo: Site officiel de l'Administration nationale de l'aéronautique et de l'espace
Questions et réponses sur l'apprentissage automatique dans la robotique
-
Quels sont quelques exemples d'applications d'apprentissage automatique en robotique ?
Des exemples d'applications d'apprentissage automatique en robotique incluent la reconnaissance d'objets, la planification de trajectoires, la navigation, le contrôle et la perception. Il est également utilisé dans l'apprentissage auto-supervisé, les technologies d'assistance et médicales, l'apprentissage multi-agents et l'apprentissage par renforcement.
-
Comment l'apprentissage automatique peut-il améliorer les performances des robots ?
L'apprentissage automatique peut améliorer les performances des robots en leur permettant d'apprendre à partir des données et de l'expérience. Il peut s'adapter à de nouvelles situations et prendre des décisions intelligentes en fonction des informations recueillies. Cela peut conduire à une meilleure précision, efficacité et robustesse du comportement du robot.
-
Comment l'apprentissage automatique est-il utilisé dans les véhicules autonomes ?
L'apprentissage automatique est utilisé dans les véhicules autonomes pour leur permettre de prendre des décisions basées sur des données sensorielles, de planifier des itinéraires et de naviguer dans des environnements complexes. Il est également utilisé pour la détection et la reconnaissance d'objets, la prédiction de comportement et la prise de décision.
-
Qu'est-ce que l'apprentissage par renforcement en robotique ?
L'apprentissage par renforcement en robotique est un type de technique d'apprentissage automatique qui consiste à entraîner des robots à apprendre par essais et erreurs. Le robot reçoit des retours sous forme de récompenses ou de pénalités en fonction de ses actions et apprend à optimiser son comportement pour maximiser sa récompense.
-
Qu'est-ce que l'apprentissage auto-supervisé en robotique ?
L'apprentissage auto-supervisé en robotique est un type de technique d'apprentissage automatique qui permet aux robots de générer leurs propres données d'entraînement en apprenant de leur environnement. Cela peut inclure l'utilisation de connaissances antérieures et de données capturées à partir de capteurs pour interpréter des données de capteur ambiguës à longue portée.
-
Comment l'apprentissage automatique est-il utilisé dans les technologies d'assistance et médicales ?
L'apprentissage automatique est utilisé dans les technologies d'assistance et médicales pour améliorer les performances et la fiabilité des systèmes robotiques pour les personnes handicapées et souffrant de problèmes de santé. Il est utilisé pour la thérapie par le mouvement, la chirurgie autonome, à des fins diagnostiques et thérapeutiques.

")




{kind=link}