
Недавнее исследование Google показало, что искусственный интеллект и машинное обучение являются одними из самых популярных областей инженерии. Прогнозируется, что будущее робототехники будет зависеть от Технологии искусственного интеллекта и машинного обучения. Тем не менее, эта статья здесь, чтобы показать, как эти две технологии могут быть применены к робототехнике сегодня.
Искусственный интеллект, машинное обучение и робототехника
Что такое искусственный интеллект?
Искусственный интеллект (ИИ) — это область компьютерных наук, которая включает изучение интеллектуальных агентов: любого устройства, которое воспринимает окружающую среду и предпринимает действия, которые максимизируют его шансы на успех в достижении какой-либо цели. Системы искусственного интеллекта используются для принятия сложных решений в условиях неопределенности и способны учиться на собственном опыте. Некоторые примеры включают компьютерное зрение, распознавание речи, обработку естественного языка (NLP), планирование и принятие решений.
ИИ был определен как «изучение и разработка интеллектуальных агентов», где интеллектуальный агент — это система, которая воспринимает окружающую среду и предпринимает действия для достижения целей. Цели могут быть конкретными или предполагаемыми; например, оператор может считать свою задачу выполненной, когда все угрозы безопасности устранены или пока не будут выполнены все приоритетные задачи.
Что такое машинное обучение?
Машинное обучение — это форма искусственного интеллекта (ИИ) и часть науки о данных. В машинном обучении компьютеры «обучаются» учиться на данных; процесс может включать такие методы, как статистическое моделирование, распознавание образов и предсказание. Название машинное обучение произошло от Артура Сэмюэля, который придумал его в 1959 году. Впоследствии к этой области присоединились другие исследователи и сформировали новую академическую дисциплину, которая с тех пор росла.
Машинное обучение исследует изучение и построение алгоритмов, которые могут учиться на данных, то есть повышать свою точность или производительность с опытом с течением времени без явного программирования (например, человеком) для этого. Первоначально эта область была названа Стюартом Милем индуктивным логическим программированием (ILP). Но многие другие предпочли интеллектуальные системы обучения или системы, основанные на знаниях. Эти системы превратились в современные экспертные системы. Они создают правила, привязанные к предопределенным условиям и действиям, обнаруженным во время выполнения или когда действия инициируются извне для выполнения датчиками, отслеживающими изменения в состоянии системы. Эти события вызываются входными причинами, такими как события таймера, возникающие по истечении определенного интервала времени с момента последней активации для повторного возобновления выполнения режима воспроизведения. Следующий цикл/итерация перезапускается раз в секунду и т. д.
В области машинного обучения разработано множество высокоэффективных алгоритмов, часто основанных на статистическом анализе и оптимизации. Эти алгоритмы используются для приложений:
- Извлечение признаков (например, автоматическое обнаружение раковых клеток),
- Распознавание образов (например, идентификация лиц),
- Интеллектуальный анализ данных (например, обнаружение новых связей между различными переменными в больших наборах данных),
- Предиктивная аналитика (например, оценка будущих результатов на основе исторических закономерностей).
Как мы определяем робототехнику?
Для тех, кто не знаком с термином «робототехника», это отрасль техники, которая занимается роботами. Слово «робот» происходит от чехословацкого слова «робот», что означает принудительный труд. Роботы — это автоматы, которые работают в соответствии с заранее запрограммированными инструкциями и могут выполнять задачи автоматически без участия человека. Их также можно запрограммировать на взаимодействие с окружающей средой и принятие решений на основе своих наблюдений.
Робот может быть определен как электромеханическая система, выполняющая определенные задачи под управлением хранящейся в ее памяти компьютерной программы (например, персонального компьютера или ПЛК). Программа направляет его при выполнении своей миссии, направляя его действия через датчики, подключенные к его сенсорным блокам ввода, и исполнительные устройства для манипулирования объектами в его окружении через приводы, подключенные к его эффекторным блокам вывода (например, моторы).
Как машинное обучение работает в робототехнике?
Машинное обучение — это разновидность ИИ, которая использует данные для самообучения. Алгоритм машинного обучения (MLA) анализирует прошлый опыт и делает прогнозы на основе этого опыта. Это означает, что MLA используются для обучения на собственном опыте, что позволяет им принимать решения без явного программирования для них.
MLA можно использовать в робототехнике для любых задач, где робот должен учиться на собственном опыте, в том числе:
- Изучая свое окружение с течением времени, чтобы он мог более эффективно ориентироваться в новых пространствах.
- Делать прогнозы о будущем состоянии окружающей среды на основе исторических записей.
- Решить, какое действие (я) лучше всего достигнет определенной цели.
Как работает ИИ в робототехнике?
ИИ — это компьютерная программа, которая может обучаться, адаптироваться и улучшать свою производительность с течением времени. Это одна из самых важных концепций в робототехнике и машинном обучении.
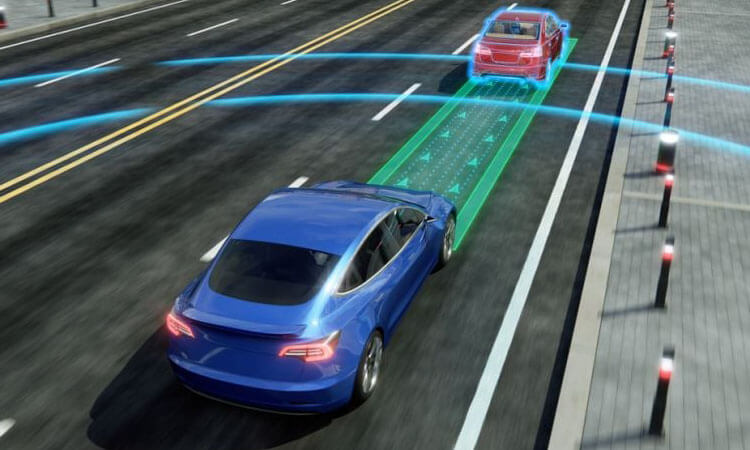
ИИ используется для питания роботов. Это позволяет им эффективно выполнять задачи без явного программирования людьми. Например, если бы у автономного транспортного средства на дороге не было ИИ, оно могло бы двигаться только прямо или выполнять самые простые маневры, такие как поворот направо или налево на перекрестках. Однако с установленным в этом транспортном средстве искусственным интеллектом он сможет перемещаться в сложных условиях. Например, здания и другие дорожки, потому что он понимает, куда он движется, на основе информации, которую он получает от своих датчиков (таких как GPS) и камер, установленных на верхней части кузова автомобиля.
Как развивался роботизированный интеллект за последние несколько десятилетий?
Роботизированный интеллект был разработан в 1950-х годах Россом Эшби, британским кибернетиком. До этого инженеры использовали фиксированные правила для своих машин, основываясь на своем опыте и интуиции. Эшби использовал математические модели для создания интеллектуальной машины, которая могла бы учиться на своем окружении и принимать решения на основе прошлого опыта. Этот подход привел к развитию нейронных сетей и компьютерного моделирования функционирования человеческого мозга.
Первый промышленный робот был изготовлен компанией Unimation в 1961 году. Он мог выполнять простые задачи, такие как загрузка и разгрузка коробок на конвейерной ленте со скоростью 40 штук в час, используя два пальца с вакуумным управлением на руку (общее количество пальцев было четыре). . К 1974 году на заводах по всему миру работало более 30 000 роботов!
Искусственный интеллект и машинное обучение в робототехнике
Вы можете думать об искусственном интеллекте и машинном обучении как о технологиях, которые помогают роботам выполнять задачи лучше, чем без этих технологий. AI и ML в робототехнике — это две стороны одной медали — обе технологии позволяют роботам учиться на основе своего взаимодействия с окружающей средой.
Многие считают ИИ концепцией научной фантастики, но он уже используется во многих аспектах нашей повседневной жизни. Например, Siri на вашем iPhone использует алгоритмы распознавания речи и обработки естественного языка (NLP), чтобы понимать, что вы говорите, и реагировать соответствующим образом. Alexa на Amazon Echos использует НЛП для понимания вопросов пользователей, таких как «Какая погода?» или «Расскажи мне анекдот». Google Translate снова использует алгоритмы НЛП для перевода текста на другой язык, например немецкий или французский.
Текущие приложения машинного обучения в робототехнике
Имитация обучения
Имитационное обучение — это тип подхода к машинному обучению, который позволяет агенту учиться на поведении других агентов или людей. Это тесно связано с наблюдательным обучением, поведением, демонстрируемым младенцами и детьми ясельного возраста. При имитационном обучении агент учится имитировать поведение учителя, который демонстрирует желаемое поведение. Этот подход часто используется в робототехнике, где ручное программирование роботизированных решений для обеспечения мобильности вне заводских условий в таких областях, как строительство, сельское хозяйство, поисково-спасательные работы, военные и другие, может оказаться сложной задачей.
Имитационное обучение является общей категорией обучения с подкреплением. Это включает в себя заставить агента действовать в мире, чтобы максимизировать его вознаграждение. Байесовские или вероятностные модели часто используются в имитационном обучении, что помогает агенту изучить политику, которая отображает состояния в действия. Вопрос о том, можно ли использовать имитационное обучение для человекоподобных роботов, впервые был поставлен в 1999 году.
Исследователи использовали имитационное обучение для разработки роботов, которые могут выполнять различные задачи, в том числе хватать предметы, ходить и перемещаться по бездорожью. Например, CMU применил методы обратного оптимального управления для разработки гуманоидной робототехники, передвижения на ногах и мобильных навигаторов для бездорожья. Видео, опубликованное два года назад исследователями из Аризонского государственного университета, показывает робота-гуманоида, использующего имитационное обучение для овладения различными техниками захвата.
Байесовские сети убеждений также применялись в моделях прямого обучения, когда робот учится без предварительного знания своей двигательной системы или внешней среды. Примером этого является «моторный лепет», продемонстрированный Группой изучения языка и робототехники в Университете Иллинойса в Урбана-Шампейне (UIUC) с Бертом, роботом-гуманоидом «iCub». Роботы могут использовать имитацию обучения на действиях людей или других агентов. Это упрощает формулирование решений сложных задач в различных областях.
Компьютерное зрение
Компьютерное зрение — это быстро развивающаяся область, которая сочетает в себе компьютерные алгоритмы и оборудование камеры, чтобы роботы могли обрабатывать физические данные. Эта технология необходима для систем управления роботами и автоматических систем контроля и имеет множество применений, включая идентификацию и сортировку объектов. В то время как компьютерное зрение, машинное зрение и зрение робота часто используются взаимозаменяемо, зрение робота включает в себя калибровку системы отсчета и способность робота физически воздействовать на окружающую среду.
Недавние достижения в области компьютерного зрения были вызваны притоком больших данных, включая аннотированные и маркированные фотографии и видео, доступные в Интернете. Методы структурированного прогнозирования на основе машинного обучения в таких университетах, как Карнеги-Меллон, сыграли важную роль в разработке приложений компьютерного зрения, таких как идентификация и сортировка объектов. Одним из примеров недавнего прорыва является использование неконтролируемого обучения для обнаружения аномалий, которое включает в себя создание систем, способных находить и оценивать неисправности в кремниевых пластинах с использованием сверточных нейронных сетей.
Развитие экстрасенсорных технологий, таких как радар и ультразвук, способствует созданию систем на основе 360-градусного зрения для автономных транспортных средств и дронов. Такие компании, как Nvidia, находятся в авангарде этой технологии, которая используется для повышения точности и безопасности автономных транспортных средств и дронов. Комбинируя компьютерное зрение с экстрасенсорными технологиями, исследователи создают системы, которые могут обнаруживать препятствия и избегать их, ориентироваться в сложной среде и выполнять различные другие задачи с беспрецедентной точностью и аккуратностью.
Вспомогательные и медицинские технологии
Вспомогательные и медицинские технологии — это области, в которых робототехника на основе машинного обучения добилась значительных успехов. Эти технологии предназначены для помощи людям с ограниченными возможностями, пожилым людям и пациентам в медицинском мире.
Вспомогательные роботы могут чувствовать, сенсорно обрабатывать информацию и выполнять действия, полезные для людей. Из-за ограничений по стоимости роботы для двигательной терапии, которые обеспечивают диагностические или терапевтические преимущества, по-прежнему в основном используются только в лаборатории. Примеры ранних вспомогательных технологий включают DeVAR, разработанный в начале 1990-х годов.
Более свежие примеры роботизированных вспомогательных технологий на основе машинного обучения включают роботизированную руку MICO, разработанную в Северо-Западном университете. Эта рука использует датчик Kinect для наблюдения за миром и адаптации к потребностям пользователя с частичной автономией, что означает разделение контроля между роботом и человеком.
Робототехника на основе машинного обучения значительно повышает хирургическую точность и надежность в медицинском мире. Автономный робот Smart Tissue (STAR) — результат сотрудничества исследователей из нескольких университетов и сети врачей, пилотируемый Национальной системой здравоохранения детей в округе Колумбия. STAR может сшить «свиные кишки» с большей точностью и надежностью, чем лучшие хирурги-люди. Хотя STAR не предназначен для замены хирургов-людей, он предлагает значительные преимущества при проведении подобных деликатных операций.
Самостоятельное обучение
Самостоятельное обучение — это мощный подход к машинному обучению, который может принести пользу роботам и другим устройствам с ограниченным доступом к размеченным данным или необходимостью создания обучающих примеров для повышения производительности. Этот подход использовался в различных приложениях, включая обнаружение объектов, анализ сцены и моделирование динамики транспортных средств.
Одним из захватывающих примеров самостоятельного обучения в действии является Watch-Bot, робот, разработанный исследователями из Корнелла и Стэнфорда. Используя комбинацию датчиков и вероятностных методов, Watch-Bot может обнаруживать нормальные модели человеческой активности и использовать лазерную указку, чтобы напоминать людям о таких задачах, как поставить молоко обратно в холодильник. В первоначальных тестах Watch-Bot успешно напоминал людям 60% того времени, и исследователи продолжили улучшать его возможности в рамках проекта под названием RoboWatch.
Еще одним примером самостоятельного обучения в робототехнике является алгоритм обнаружения дорог, разработанный в Массачусетском технологическом институте для автономных транспортных средств и других мобильных роботов. Этот алгоритм использует камеру переднего обзора и модель вероятностного распределения для определения дорог и препятствий на пути.
В дополнение к самоконтролируемому обучению, автономное обучение — это еще один вариант машинного обучения, который может принести пользу роботам и другим автономным устройствам. Один из подходов, разработанный командой Имперского колледжа Лондона, использует глубокое обучение и неконтролируемые методы для включения неопределенности модели в долгосрочное планирование и обучение контроллеров. Этот статистический подход к машинному обучению может уменьшить влияние ошибок модели и ускорить процесс обучения, как продемонстрировано командой в видеоролике с манипулятором.
Мультиагентное обучение
Мультиагентное обучение — это метод машинного обучения, который включает координацию и согласование между несколькими роботами или агентами для достижения общей цели. Стратегии равновесия находятся с помощью алгоритмов обучения, которые позволяют агентам адаптироваться к меняющейся среде. Одним из примеров такого подхода является использование инструментов беспроигрышного обучения, в которых используются взвешенные алгоритмы для улучшения результатов многоагентного планирования, а также обучение в рыночных распределенных системах управления.
Лаборатория информационных систем и систем принятия решений Массачусетского технологического института разработала конкретный пример распределенного алгоритма для совместной работы роботов и создания более инклюзивной модели обучения. Роботы исследуют здание и планировку его комнат, каждое здание имеет собственный каталог, который объединяется для создания базы знаний. Такой подход позволяет роботам обрабатывать меньшие порции информации и достигать лучших результатов при совместной работе, чем один робот. Хотя этот тип машинного обучения и не идеален, он позволяет роботам усиливать взаимные наблюдения, сравнивать каталоги или наборы данных и исправлять упущения или чрезмерные обобщения.
Мультиагентное обучение может быть использовано в нескольких приложениях, включая автономные наземные и бортовые транспортные средства. Этот подход может привести к более эффективной и результативной работе, поскольку роботы общаются и сотрудничают для достижения общей цели. Однако необходимы дальнейшие исследования и разработки, чтобы оптимизировать этот метод для реального использования.
Применение машинного обучения и искусственного интеллекта к робототехнике в различных отраслях
Робототехника может применяться в различных отраслях, таких как сельское хозяйство, здравоохранение, производство, логистика и так далее.
- Сельское хозяйство: В настоящее время использование дронов для осмотра урожая стало очень распространенным явлением. Эти дроны оснащены датчиками, которые измеряют различные параметры, такие как влажность почвы, уровень удобрений и т. д. Данные, собранные с этих датчиков, отправляются обратно на сервер, где алгоритм анализирует их и отправляет предложения или предупреждения фермерам через SMS или мобильное приложение. уведомления в зависимости от состояния посевов/угодий.
- Здравоохранение: Роботы на основе искусственного интеллекта используются в больницах по всему миру для различных целей, таких как помощь врачам во время хирургических процедур или диагностика пациентов путем сканирования изображений, полученных с аппаратов МРТ. Например, платформа искусственного интеллекта IBM Watson была успешно развернута в Highland Hospital Partners — крупнейшей группе больниц Шотландии. Он основан на его способности читать медицинские записи быстрее, чем любой врач-человек (Watson смог прочитать 1 миллион страниц за 10 минут). Исследование, проведенное компанией Accenture Strategy Limited, показывает, что уровень внедрения инициатив цифровой трансформации среди поставщиков медицинских услуг выше, чем в любых других отраслевых вертикалях (60%), за которыми следуют финансовые услуги (52%).
- Производство: Производственный сектор является одной из самых важных отраслей в любой стране. Роботы с искусственным интеллектом используются для автоматизации производственных процессов и повышения эффективности. Например, General Motors недавно выпустила нового робота под названием Baxter, который поможет людям выполнять повторяющиеся задачи, такие как извлечение деталей из мусорных баков или их сварка с минимальным контролем.
- Логистика: Роботы с искусственным интеллектом используются для оптимизации логистических процессов и сокращения затрат. Например, DHL запустила нового робота с искусственным интеллектом под названием «PakBot». Это поможет людям сканировать посылки, упаковывать товары в коробки и маркировать их штрих-кодами, чтобы сократить время, необходимое для доставки товаров по всему миру (это также должно гарантировать, что клиенты получат свои заказы быстрее).
- Образование: Роботы с искусственным интеллектом используются для различных целей в образовании. Например, роботы помогают учителям оценивать сочинения и работы быстрее и точнее, чем когда-либо прежде. Их также можно использовать в классах, чтобы научить детей важным жизненным навыкам, например, как готовить или убирать за собой.
Будущее ИИ и машинного обучения в робототехнике
Как мы видели, ИИ и машинное обучение уже много лет применяются в робототехнике. Технологии постоянно развиваются, открывая двери для новых способов внедрения ИИ и машинного обучения в мир робототехники. Это означает, что вполне возможно, что вы увидите, как AI и ML используются так, как вы даже не думали!
AI и ML могут применяться к робототехнике во многих других отраслях, помимо производства или здравоохранения, а также в других областях, помимо того, что мы здесь обсуждали. Например, исследователи изучают, как они могли бы использовать алгоритмы машинного обучения, основанные на методах глубокого обучения, для обучения роботов новым навыкам быстрее, чем когда-либо прежде. Одно из таких исследований показало, что компьютеры могут научиться распознавать объекты вокруг себя после того, как увидят, как люди делают это только один раз — обычно на это у людей уходит несколько часов или дней!
Заключение
Теперь вы ясно понимаете роль ИИ и машинного обучения в робототехнике. Они уже используются и будут использоваться в будущем. Они используются во всех аспектах робототехники, хотя и не являются необходимыми для каждой части функции робота. И они, вероятно, будут использоваться больше в будущем по мере дальнейшего развития технологий.
Источник видео: Официальный сайт Национального управления по аэронавтике и исследованию космического пространства
Вопросы и ответы о машинном обучении в робототехнике
-
Каковы некоторые примеры приложений машинного обучения в робототехнике?
Примеры приложений машинного обучения в робототехнике включают распознавание объектов, планирование пути, навигацию, управление и восприятие. Он также используется в самоконтролируемом обучении, вспомогательных и медицинских технологиях, многоагентном обучении и обучении с подкреплением.
-
Как машинное обучение может улучшить производительность роботов?
Машинное обучение может повысить производительность роботов, позволяя им учиться на основе данных и опыта. Он может адаптироваться к новым ситуациям и принимать разумные решения на основе собранной информации. Это может привести к большей точности, эффективности и устойчивости поведения робота.
-
Как машинное обучение используется в автономных транспортных средствах?
Машинное обучение используется в автономных транспортных средствах, чтобы они могли принимать решения на основе сенсорных данных, планировать маршруты и перемещаться в сложных условиях. Он также используется для обнаружения и распознавания объектов, прогнозирования поведения и принятия решений.
-
Что такое обучение с подкреплением в робототехнике?
Обучение с подкреплением в робототехнике — это метод машинного обучения, который включает обучение роботов обучению методом проб и ошибок. Робот получает обратную связь в виде вознаграждений или штрафов в зависимости от своих действий и учится оптимизировать свое поведение, чтобы максимизировать вознаграждение.
-
Что такое самоконтролируемое обучение в робототехнике?
Самоконтролируемое обучение в робототехнике — это метод машинного обучения, который позволяет роботам генерировать свои собственные обучающие данные, обучаясь в своей среде. Это может включать использование предварительных знаний и данных, полученных от датчиков, для интерпретации неоднозначных данных датчиков дальнего действия.
-
Как машинное обучение используется во вспомогательных и медицинских технологиях?
Машинное обучение используется в ассистивных и медицинских технологиях для повышения производительности и надежности роботизированных систем для людей с ограниченными возможностями и заболеваниями. Используется для двигательной терапии, автономной хирургии, в диагностических и лечебных целях.
")






{kind=link}