
I sensori di visione sono utilizzati in diversi settori, tra cui robotica, la produzione automobilistica e i videogiochi. I sensori di visione sono in fase di sviluppo da decenni e la tecnologia è migliorata in modo significativo. Questo articolo esamina le basi dei sensori di visione e fornisce una panoramica del loro funzionamento. Verranno inoltre illustrati alcuni termini tecnici importanti, indispensabili da conoscere quando si lavora con i sensori di visione. Infine, parleremo di alcune applicazioni dei sensori di visione, in modo che lei possa vedere come vengono impiegati oggi nelle applicazioni reali!
Principio di funzionamento del sensore di visione
I sensori di visione sono in genere assemblati da una telecamera, un display, un'interfaccia e un processore informatico. Utilizza principalmente questi componenti per automatizzare i processi e le decisioni industriali. Registra le misurazioni degli oggetti e prende decisioni di tipo pass/fail. Inoltre, supporta l'ispezione della qualità del prodotto analizzabile. Un sensore di visione con un processore integrato può essere chiamato un telecamera intelligente. Una fotocamera intelligente è in grado non solo di acquisire immagini, ma anche di elaborarle. Questa fotocamera consente vari livelli di visione incorporata ed è un esempio preferito di sensore di visione per i fotografi amatoriali.
I sensori di visione utilizzano le immagini per determinare la presenza, l'orientamento e la precisione di un determinato oggetto. Supporta l'acquisizione e l'elaborazione delle immagini. Può anche utilizzare a singolo sensore per il rilevamento multipunto. Il sensore di visione è destinato allo scambio di dati tra la fotocamera e l'unità elaborata dal computer. Confronta e analizza l'immagine acquisita con un'immagine di riferimento memorizzata. Supponiamo che il sensore di visione sia impostato con uno stato di impostazione di otto bulloni inseriti nel corpo. Quindi può identificare rapidamente le parti non conformi durante il processo di ispezione. Questi componenti non conformi possono essere componenti con solo sette bulloni o bulloni disallineati sulla macchina. Inoltre, può esprimere giudizi corretti sulla posizione e sull'angolo di rotazione delle parti della macchina.
C'è una chiara differenza tra questi sensori e i sistemi di rilevamento delle immagini. Rendono l'installazione e il funzionamento del dispositivo estremamente semplice. Sono anche diversi da altri sensori di uso generale. Un esempio tipico è un sensore di visione singolo che può rilevare più punti. Consente inoltre di rilevare oggetti con posizioni di destinazione non coerenti.
I sensori di visione sono disponibili in modelli monocromatici e a colori. Il modello monocromatico identifica principalmente l'intervallo di intensità tra le aree bianche e nere. La telecamera cattura l'immagine del modello. Un ricevitore ottico (compatibile CMOS) passa l'immagine catturata attraverso la telecamera. Poi la converte in un segnale elettrico. Supporta il riconoscimento della forma, dell'orientamento e della luminosità degli oggetti. La luce ricevuta dal modello a colori viene suddivisa in rosso, verde e blu. Consente alle persone di identificare il colore di un oggetto in base alla sua differenza di intensità.
Analisi dei termini tecnici del sensore di visione
- Pixel: È l'unità fotosensibile di base sul dispositivo fotosensibile. È quella piccola unità di un'immagine che la fotocamera è in grado di riconoscere. In poche parole, è una combinazione di immagini ed elementi.
- Scala di grigi: L'intensità della luce a cui è esposto un oggetto. Classifica l'intensità della luce a cui è esposto un oggetto dal nero al bianco. Ha un totale di 256 livelli di grigio.
- Distanza di lavoro: La distanza dal barilotto dell'obiettivo all'oggetto
- Campo visivo (FOV): L'area fisica che può essere vista utilizzando una telecamera. Il suo campo visivo viene calcolato in base ai valori generali della sorgente luminosa e dell'area attiva:
La lunghezza longitudinale della telecamera area effettiva (V) / multiplo ottico (M)= campo visivo (V)
Lunghezza trasversale dell'area effettiva della telecamera (H) / multiplo ottico (M)= campo visivo (H)
Lunghezza verticale (V) o orizzontale (M) dell'area effettiva della telecamera = dimensione di un pixel della telecamera × numero di pixel effettivi (V) o (H) - Profondità di campo: La distanza tra la parte anteriore e posteriore di un'immagine nitida di un oggetto a fuoco.
- Lunghezza focale (f): La distanza dal centro di una lente al suo punto focale.
- Obiettivo a fuoco fisso: La lunghezza focale dell'obiettivo. Non si può regolare l'obiettivo a fuoco fisso. Non si può regolare.
- Obiettivo zoom: Lunghezza focale dell'obiettivo regolabile.
- Luminanza dei bordi: percentuale di illuminazione centrale e periferica
- Funzione di trasferimento della modulazione (MTF): La variazione di intensità della superficie dell'oggetto. Questa funzione rappresenta la prestazione di imaging dell'obiettivo e il contrasto dell'oggetto ripreso.
- Binarizzazione: Converte i colori della concentrazione di ordine 256 in bianco e nero. Di solito, il processo di binarizzazione è seguito dalla misurazione dei pixel bianchi.
- Otturatore: Un dispositivo utilizzato per controllare la tempistica dell'esposizione alla luce di un elemento fotografico.
- Apertura: Un dispositivo che controlla la quantità di luce che entra nel corpo attraverso la lente. Di solito si trova all'interno dell'obiettivo. Il numero f viene spesso utilizzato per indicare la dimensione dell'apertura.
- Ciclo di ingresso dell'immagine: Tempo per acquisire un'immagine.
- Precisione: La differenza tra il valore misurato e il valore reale
- Replicare il valore: Differenza dei valori da test multipli
- Risoluzione: Il numero di linee bianche e nere visibili al centro di 1 mm. La sua unità è (lp)/mm.
- Tempo di esposizione: Il processo attraverso il quale la luce viene percepita sulla superficie di un dispositivo fotosensibile.
- Telecamere industriali - Interfaccia obiettivo
| Tipo di interfaccia | C | CS | 4/3口 | F | EF | PK | C/Y |
| Flangia posteriore Lunghezza focale | 17.526 | 12.5 | 38.58 | 46.5 | 44 | 45.5 | 45.5 |
| Diametro dell'anello a baionetta (mm) | 1(INCH) | 1(INCH) | 46.5 | 47 | 54 | 48.5 | 48 |
Tipi di sensori di visione
I sensori di visione e di immagine possono essere suddivisi in due categorie in base alla loro struttura e ai loro componenti. Queste due categorie sono i dispositivi ad accoppiamento di carica e i semiconduttori complementari a ossido di metallo CMOS. I dispositivi ad accoppiamento di carica utilizzano un materiale semiconduttore altamente sensibile alla luce. Convertono la luce in carica elettrica e la trasformano in un segnale digitale attraverso un chip di conversione analogico-digitale.
Il CMOS utilizza semiconduttori composti da due elementi, il silicio e il germanio. Questo materiale gli consente di coesistere su CMOS con semiconduttori di livello N e P. La corrente generata da entrambi può essere registrata e interpretata in un'immagine da un chip di elaborazione. I sensori di immagine di tipo CCD funzionano con un rumore molto basso. Il sensore può anche mantenere una buona condizione in condizioni ambientali poco luminose. Il sensore di immagine di tipo CMOS ha una qualità migliore rispetto al sensore normale. Può supportare un'alimentazione a bassa tensione.
Sistema di visione vs sensore di visione
I termini sistema di visione e sensore di visione sono spesso usati in modo intercambiabile, ma ci sono alcune sottili differenze:
- Un sensore di visione è una singola telecamera o sensore di immagine che acquisisce informazioni visive. Converte le informazioni ottiche in immagini digitali che possono essere elaborate. Gli esempi includono fotocamere CMOS, camere CCD, ecc.
- Un sistema di visione incorpora più sensori di visione e componenti aggiuntivi per percepire, analizzare e interpretare le informazioni visive in modo più avanzato. Un sistema di visione di solito include:
- Telecamere multiple con diversi obiettivi, prospettive, campi visivi, ecc., per visione stereo, vista panoramica, ecc.
- Hardware/software di elaborazione delle immagini per attività come il miglioramento delle immagini, la segmentazione, il riconoscimento degli oggetti, la ricostruzione 3D, il tracciamento, ecc.
- Apparecchiature di illuminazione per illuminare adeguatamente la scena.
- Componenti meccanici per controllare il posizionamento e la messa a fuoco della fotocamera.
- Potenza di calcolo per elaborare i dati visivi in tempo reale.
Pertanto, un sistema di visione fornisce una soluzione più olistica per la percezione della macchina utilizzando telecamere e hardware/software associati. I sensori di visione sono componenti chiave di un sistema di visione, ma un sistema include anche elementi aggiuntivi.
I sistemi di visione sono utili per applicazioni come veicoli autonomi, visione robotica, ispezione visiva, sorveglianza, riconoscimento facciale, riconoscimento dei gesti, tracciamento e altro ancora. I sensori a visione singola hanno capacità più limitate per attività complesse di percezione della macchina.
In breve, un sistema di visione mira a dotare le macchine di "vista" visiva, mentre un sensore di visione mira a catturare informazioni visive sotto forma di immagini digitali. Un buon sistema di visione si basa su sensori di visione di alta qualità ma offre funzionalità visive molto più sofisticate.
Caratteristiche del sensore di visione
Installazione
Le persone sono soggette a danni e perdite quando utilizzano le telecamere nei sensori di visione. L'indurimento della borsa della fotocamera e dell'obiettivo aiuta a prevenire i danni alla fotocamera. Le telecamere di questi sensori di visione sono installate in modo permanente durante il processo di produzione. L'installazione permanente assicura che la telecamera possa registrare il campo visivo corretto durante l'uso. La maggior parte delle persone sceglie anche di utilizzare cavalletti, braccioli e supporti antiurto per posizionare e proteggere la telecamera.
Ispezione
I sensori di visione possono essere programmati per rilevare molte caratteristiche diverse. Per esempio:
- I sensori di area possono rilevare alcune caratteristiche mancanti, come i fori, nella parte in lavorazione. Ispeziona i blister per assicurarsi che ogni blister sia riempito.
- Il sensore di difetti verifica un difetto dell'articolo. Ad esempio, graffi sulla superficie e corpi estranei sul materiale di imballaggio.
- Abbinare il sensore per verificare la posizione dell'etichetta. Confronterà il modello prodotto con il modello di riferimento. Verifica la posizione dell'etichetta sulla confezione mediante un confronto.
- Parti di ispezione del sensore di classificazione. Utilizza diverse modalità per ispezionare e orientare le parti. Possiamo usarlo in sala operatoria per verificare che tutti i componenti del kit chirurgico siano in posizione.
Applicazione del sensore di visione
Sensore del contatore di pixel
Il sensore del contatore di pixel è destinato a misurare un oggetto utilizzando i singoli pixel che hanno lo stesso valore di grigio nell'immagine calcolata. Il sensore ha un approccio unico per determinare la forma, la dimensione e l'ombreggiatura dei singoli oggetti. Il sensore determina i valori della scala di grigi degli oggetti raggruppandoli. I sensori di conteggio dei pixel vengono utilizzati in genere nei seguenti modi:
- Analisi dei punti di saldatura
- Verifica delle filettature mancanti nelle parti in metallo
- Rilevamento del marchio del registro
- Analisi della quantità di colla del giunto
- Rilevamento del contrasto durante il montaggio
- Verifica della forma corretta dei prodotti stampati a iniezione
- Calcolo del numero di fori nel rotore
Lettore di codici

I lettori di codici sono una delle applicazioni più popolari dei sensori di visione. Il sensore consente la lettura di codici a barre e di codici bidimensionali specifici. Questi specifici codici bidimensionali sono codici bidimensionali che il lettore può leggere da sinistra a destra. Il lettore di codice può riconoscere e decodificare il codice a barre. Il lettore supporta anche la lettura di domino, sudoku e molti stili di carattere diversi. Possiamo utilizzare questo tipo di sensore di visione nei seguenti modi:
- Leggere le etichette dell'imballaggio dei prodotti
- Classificazione dei prodotti
- Rilevamento dei segni di colore
- Rilevamento dei segni di difetto
Lettura correlata:
- Lettori di carte di prossimità: pro e contro
- Guida per principianti ai lettori di carte RFID e al loro utilizzo
Sensore di profilo

I sensori di contorno vengono utilizzati principalmente per riconoscere e assegnare oggetti precedentemente definiti. Il sensore analizza la forma e il contorno di oggetti specifici e di oggetti nella pipeline di elaborazione. Esegue anche un'identificazione secondaria degli oggetti che passano. I sensori di profilo spesso controllano la struttura, l'orientamento, la posizione e l'integrità degli oggetti. Le applicazioni dei sensori di profilo sono:
- Controllo qualità
- Verifica dei fori di punzonatura nelle barre d'acciaio
- Verifica del dado ruota automobilistico
- Determinazione della posizione del cucchiaio nella confezione
- Determinazione di altre posizioni del sensore
- Verifica del corretto allineamento delle parti automobilistiche
Sensore 3D
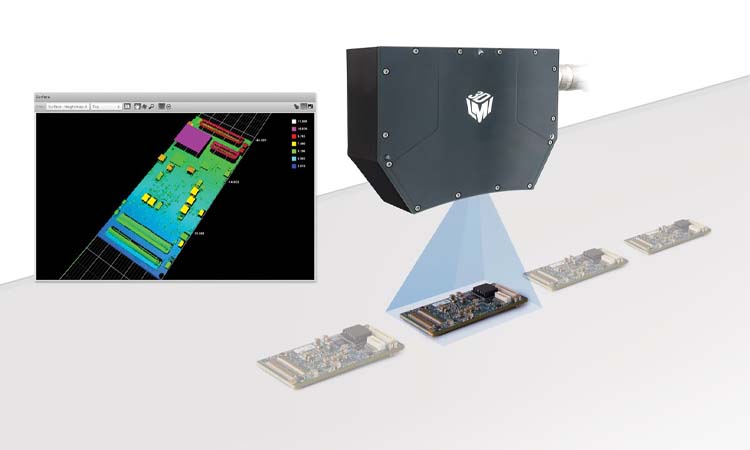
Sensori 3D scansionare la superficie e la profondità di un oggetto. Sono comunemente utilizzati per analizzare la presenza di un oggetto in un pacchetto. Supportano anche la determinazione di un oggetto in base alle sue dimensioni. Le applicazioni più comuni per questi sensori sono:
- Misurazione di solidi opachi e di materiali sfusi in serbatoi o silo.
- Verifichi che nella cassa sia presente una quota completa di bottiglie.
- Calcolo delle dimensioni e del volume dei pacchi nel magazzino e nel centro di distribuzione
Come scegliere il sensore di visione giusto?
Man mano che i sensori di visione diventano più diffusi, le nostre opzioni iniziano a crescere. L'occhio di un sistema di visione artificiale è una telecamera. Il cuore della telecamera è il sensore di immagine. In termini di opzioni di sensori, dobbiamo considerare relativamente altri aspetti. Queste includono la precisione, il costo del sistema e la comprensione dei requisiti dell'applicazione. Spesso possiamo restringere la ricerca avendo una comprensione generale delle caratteristiche principali del sensore. Saremo in grado di ridurre il tempo per trovare il sensore giusto.
In una determinata applicazione, possiamo determinare la scelta del sensore in base a tre diversi elementi. Si tratta di gamma dinamica, velocità e reattività. Alcuni dicono che la gamma dinamica è la capacità di dettaglio. Questa gamma determina la qualità dell'immagine che il sistema può catturare. La velocità di un sensore è il numero di immagini che il sensore può produrre al secondo. C'è anche la produzione di immagini che il sistema può ricevere. La reattività è l'efficienza con cui il sensore converte i fotoni in elettroni. La reattività determina il livello di luminosità di cui il sistema ha bisogno per catturare un'immagine utile. Gli sviluppatori di sistemi possono studiare queste caratteristiche sui loro benchmark. Queste caratteristiche li aiutano a fare le giuste valutazioni.
La maggior parte delle persone utilizza i sensori di visione in linee di lavorazione automatizzate. Aiuta l'azienda a determinare la qualità del prodotto all'interno di un determinato lotto. Inoltre, aiuta a garantire l'uniformità del prodotto. I sensori di visione possono essere utilizzati in un'ampia varietà di settori. Questi settori includono gli alimenti, le bevande, le linee di assemblaggio per lo stampaggio a iniezione, la robotica e la produzione in generale.
Domande frequenti sui sensori di visione
-
Cosa sono i sensori di visione e come funzionano?
I sensori di visione utilizzano telecamere e algoritmi di elaborazione delle immagini per acquisire, analizzare e interpretare i dati visivi. Catturano immagini di un oggetto fisico e utilizzano algoritmi per estrarre informazioni utili.
-
Quali sono i diversi tipi di sensori di visione disponibili?
I diversi tipi di sensori di visione disponibili includono sensori 2D e 3D, a colori, termici e infrarossi.
-
In che modo i sensori di visione gestiscono l'acquisizione e l'elaborazione delle immagini?
I sensori AVision gestiscono l'acquisizione e l'elaborazione delle immagini utilizzando fotocamere, obiettivi e algoritmi di elaborazione delle immagini che estraggono informazioni utili dalle immagini acquisite.
-
Quali sono i diversi protocolli di comunicazione utilizzati nei sistemi Vision Sensor?
I diversi protocolli di comunicazione utilizzati nei sistemi di sensori di visione includono protocolli Ethernet, RS-232, USB e wireless.
-
In che modo i sensori di visione gestiscono la gestione dell'alimentazione per il funzionamento a lungo termine?
I sensori di visione gestiscono la gestione dell'alimentazione per il funzionamento a lungo termine utilizzando componenti a basso consumo, design a risparmio energetico e modalità di risparmio energetico.
-
Quali sono le differenze tra i sensori di visione 2D e 3D?
I sensori di visione 2D acquisiscono immagini bidimensionali, mentre i sensori di visione 3D acquisiscono immagini tridimensionali, consentendo una percezione della profondità più accurata.
-
In che modo i sensori di visione gestiscono i cambiamenti nell'illuminazione e nelle condizioni ambientali?
I sensori di visione gestiscono i cambiamenti nell'illuminazione e nelle condizioni ambientali attraverso algoritmi adattivi e tecniche di compensazione dell'illuminazione.
-
In che modo i sensori di visione possono essere integrati con altri sistemi automatizzati per la massima efficienza?
I sensori di visione possono essere integrati con altri sistemi automatizzati utilizzando API e protocolli, consentendo lo scambio di dati e l'interoperabilità.

.")




{kind=link}